Giwon Lee
KAIST VIlab. 1st Year Ph.D. student

Hello! I am a first-year Ph.D. student in VILAB led by Prof. Kuk-Jin Yoon in the Department of Mechanical Engineering at KAIST. I work on Motion Planning and End-to-End Autonomous Driving. I aim to integrate planning and policy learning while enabling fast adaptation to diverse roads, weather, and traffic. Safety and Generalization are my core goals, and I benchmark methods rigorously in simulation and with real-world data.
I enjoy open discussions on research and practice, and I am always open to exchanging ideas on Motion Planning and End-to-End Autonomous Driving. Please feel free to get in touch by email or on LinkedIn.
news
| Sep 18, 2025 | “VR-Drive: Viewpoint-Robust End-to-End Driving with Feed-Forward 3D Gaussian Splatting,” has been accepted to NeurIPS 2025. |
|---|
selected publications
-
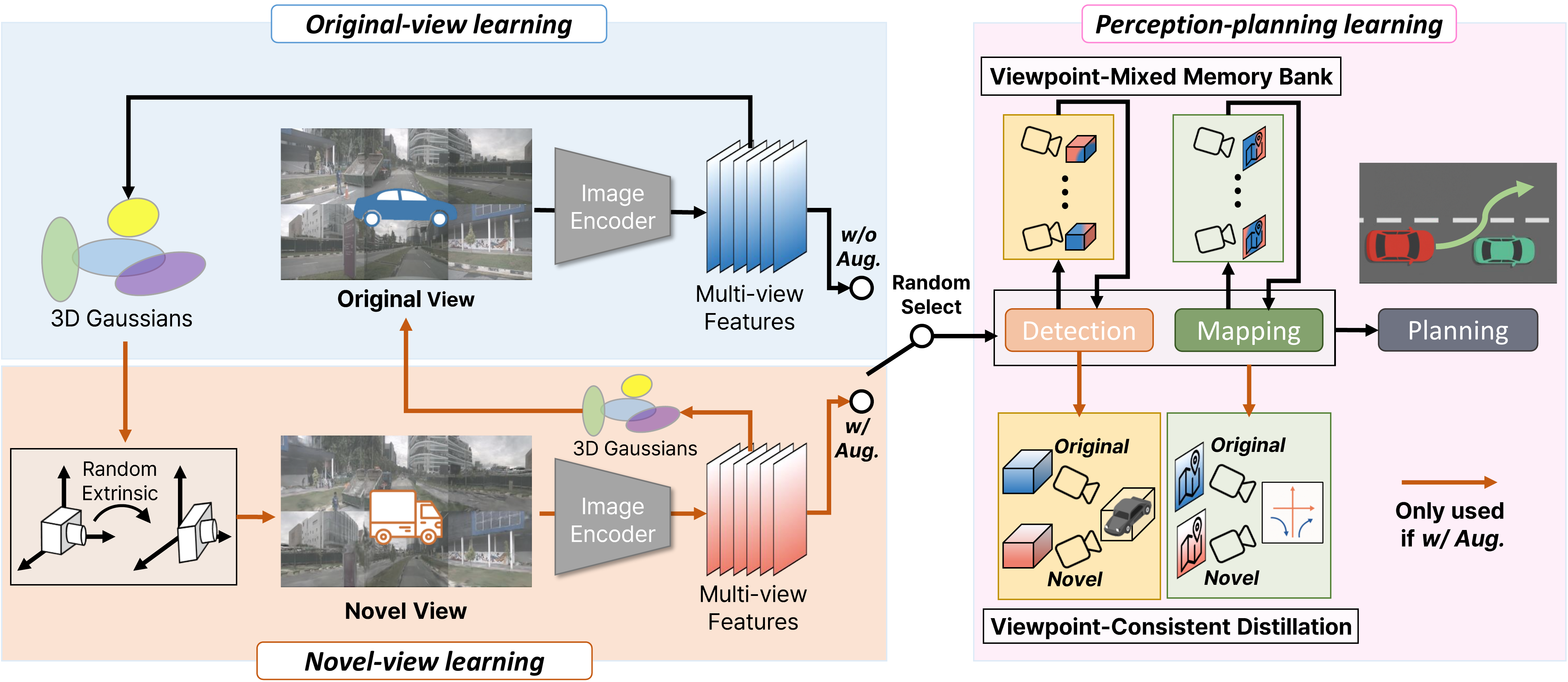 VR-Drive: Viewpoint-Robust End-to-End Driving with Feed-Forward 3D Gaussian SplattingConference on Neural Information Processing Systems (NeurIPS), 2025
VR-Drive: Viewpoint-Robust End-to-End Driving with Feed-Forward 3D Gaussian SplattingConference on Neural Information Processing Systems (NeurIPS), 2025 -
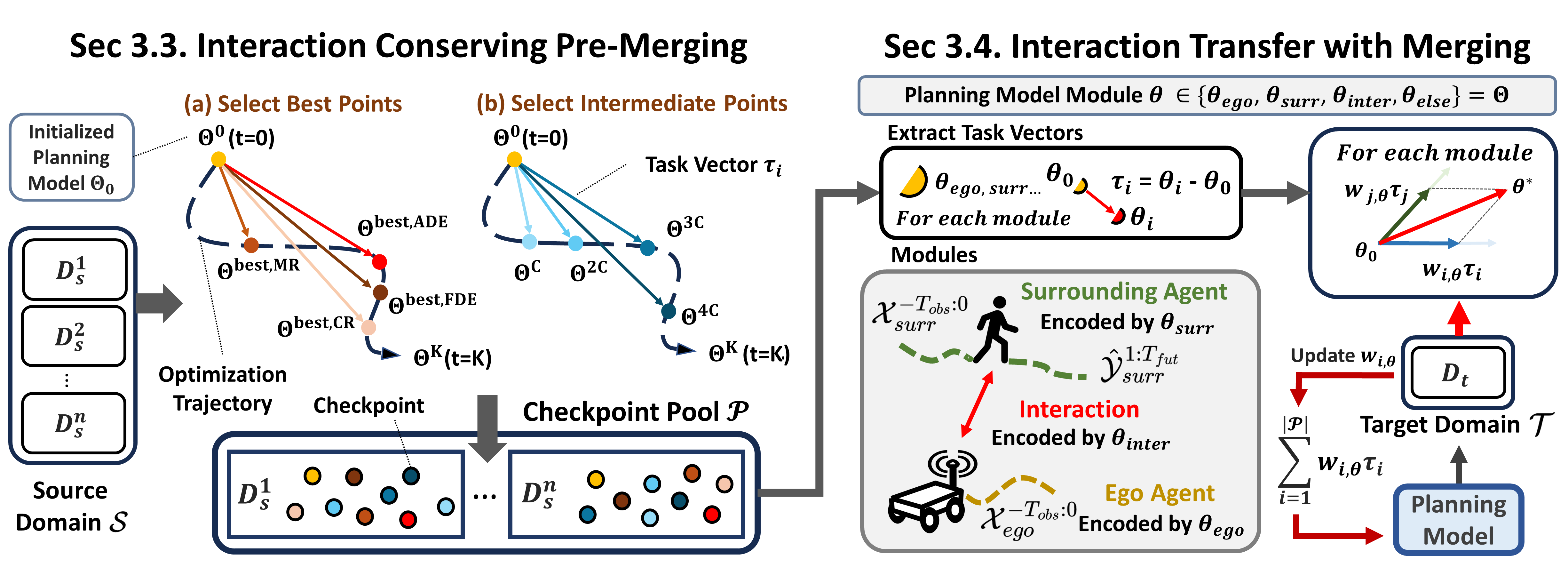 Interaction-Merged Motion Planning: Effectively Leveraging Diverse Motion Datasets for Robust PlanningIEEE/CVF International Conference on Computer Vision (ICCV), 2025⭐ Highlight ⭐
Interaction-Merged Motion Planning: Effectively Leveraging Diverse Motion Datasets for Robust PlanningIEEE/CVF International Conference on Computer Vision (ICCV), 2025⭐ Highlight ⭐ -
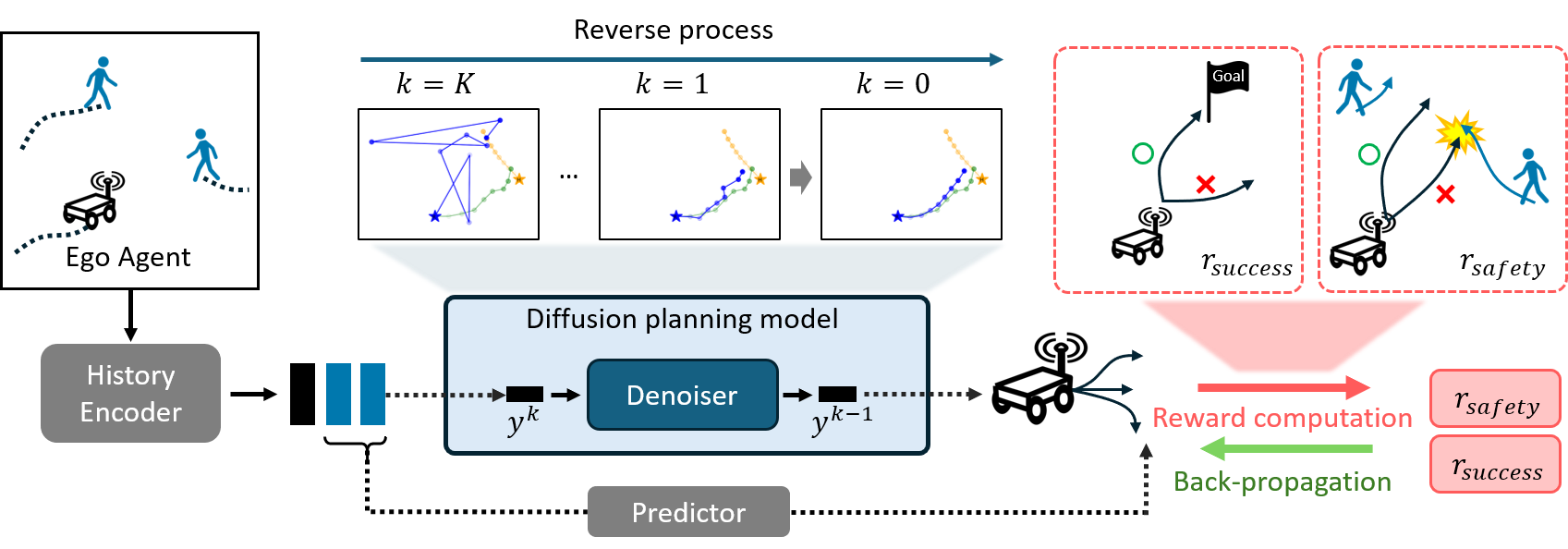 Non-differentiable Reward Optimization for Diffusion-based Autonomous Motion PlanningIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
Non-differentiable Reward Optimization for Diffusion-based Autonomous Motion PlanningIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 -
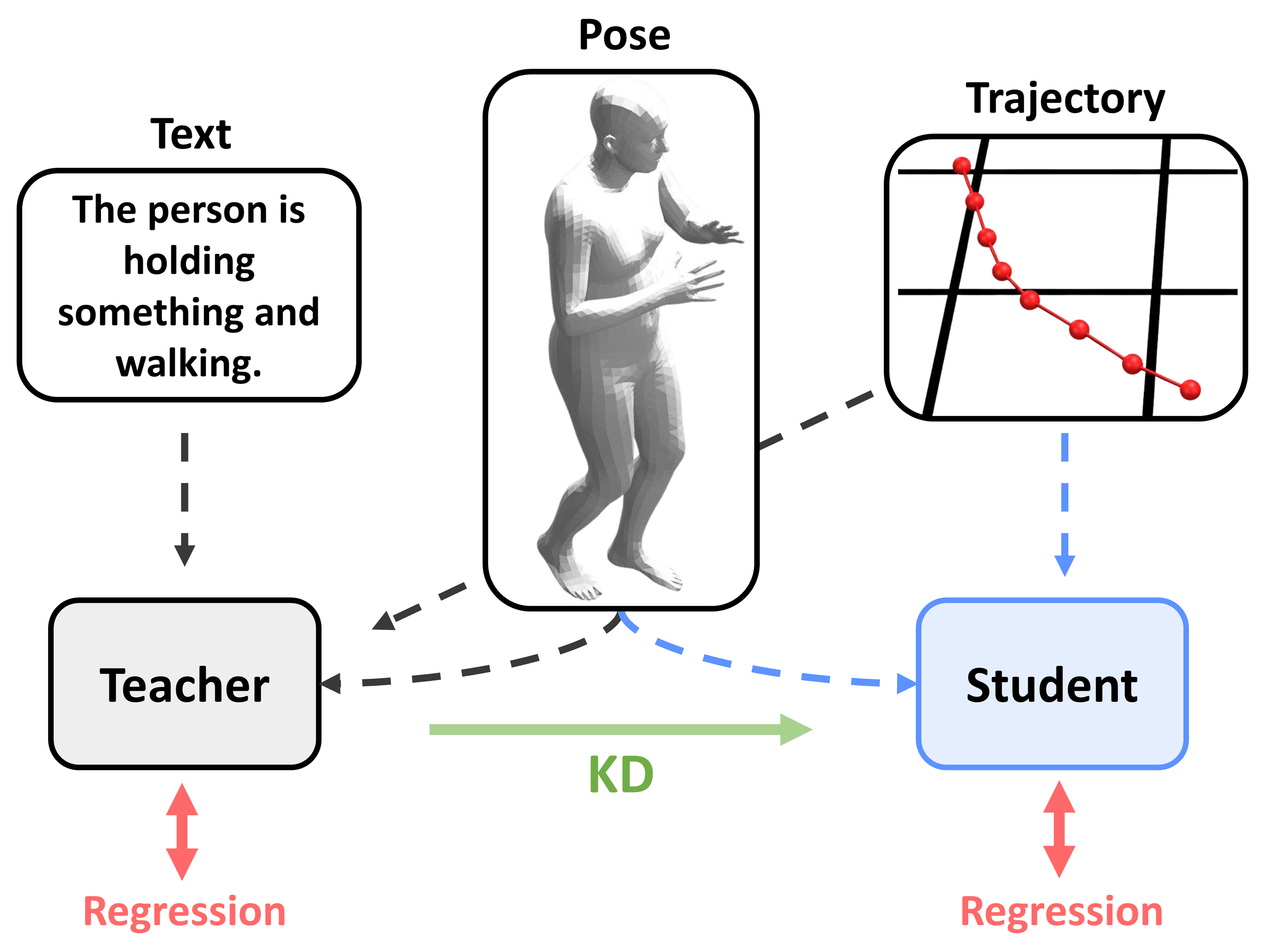 Multi-modal Knowledge Distillation-based Human Trajectory ForecastingIEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025
Multi-modal Knowledge Distillation-based Human Trajectory ForecastingIEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025