Giwon Lee
KAIST VILAB. 1st Year Ph.D. student

Hello! I am a first-year Ph.D. student in VILAB led by Prof. Kuk-Jin Yoon in the Department of Mechanical Engineering at KAIST. My research spans the full spectrum of planning — from high-level reasoning to low-level control — with the long-term goal of building a single, coherent framework that can be entrusted to act fully autonomously, end to end.
I think of this stack in three layers. At the high level, Agentic AI handles reasoning, decision-making, and long-horizon planning. As the bridge, Vision-Language-Action (VLA) and Vision-Language Navigation (VLN) models ground language and perception into embodied action. At the low level, Motion Planning and End-to-End Autonomous Driving turn intent into safe, executable behavior. My earlier research centered on this low level, primarily in autonomous driving; my current work moves up the stack to the high and bridge levels — these days on Agentic AI, VLA, and VLN — building toward connecting all three into one autonomous whole.
I am also eager to gain hands-on industry experience through internships, and I would be grateful to hear about any relevant opportunities. Please feel free to get in touch by email or on LinkedIn.
news
| Jun 18, 2026 | Two papers, “Unified Prediction and Planning via Conflict-Aware Disjoint Parameter Training” and “VIPS: Vehicle-Infrastructure Cooperative Planning Benchmark via Pseudo-Simulation,” have been accepted to ECCV 2026. |
|---|---|
| Sep 18, 2025 | “VR-Drive: Viewpoint-Robust End-to-End Driving with Feed-Forward 3D Gaussian Splatting,” has been accepted to NeurIPS 2025. |
selected publications
-
 Unified Prediction and Planning via Conflict-Aware Disjoint Parameter TrainingEuropean Conference on Computer Vision (ECCV), 2026
Unified Prediction and Planning via Conflict-Aware Disjoint Parameter TrainingEuropean Conference on Computer Vision (ECCV), 2026 -
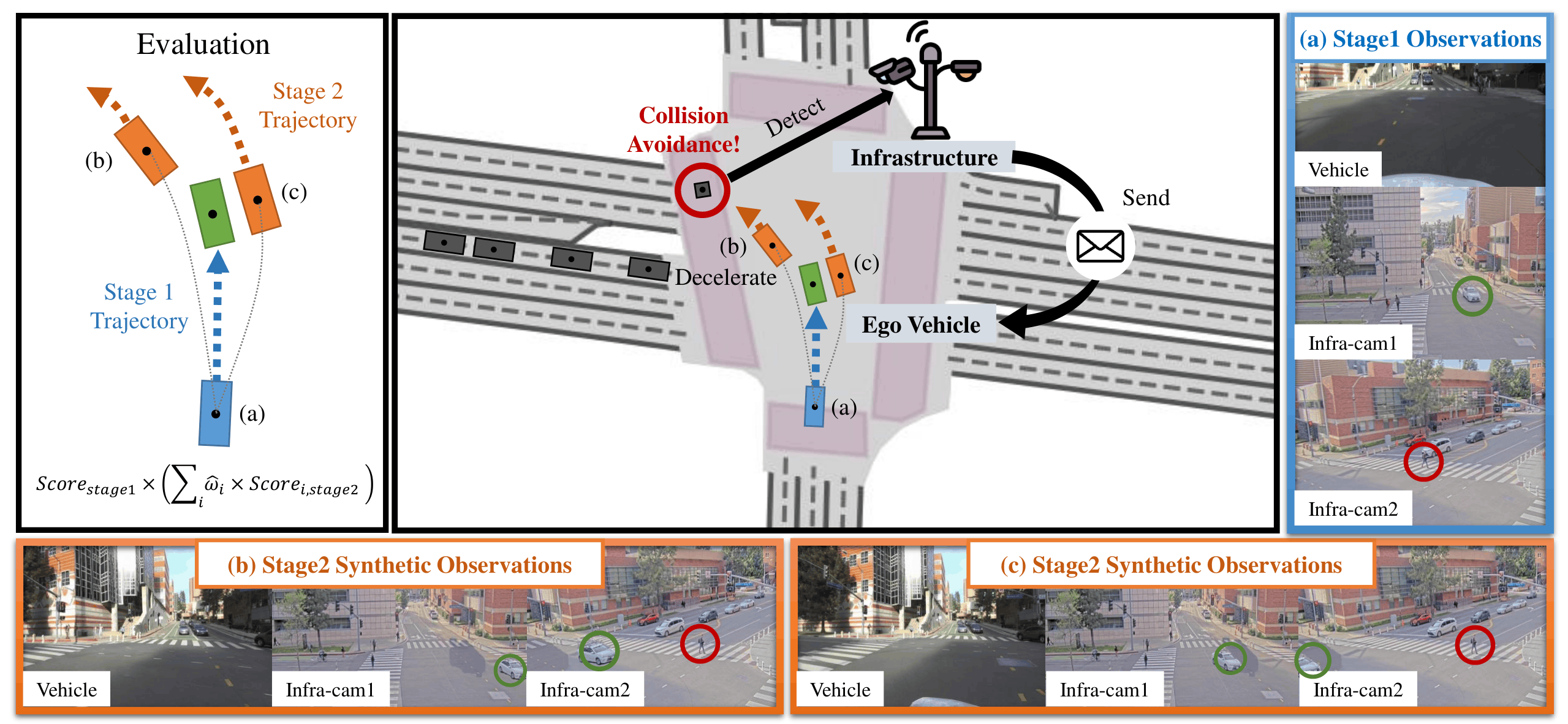 VIPS: Vehicle-Infrastructure Cooperative Planning Benchmark via Pseudo-SimulationEuropean Conference on Computer Vision (ECCV), 2026
VIPS: Vehicle-Infrastructure Cooperative Planning Benchmark via Pseudo-SimulationEuropean Conference on Computer Vision (ECCV), 2026 -
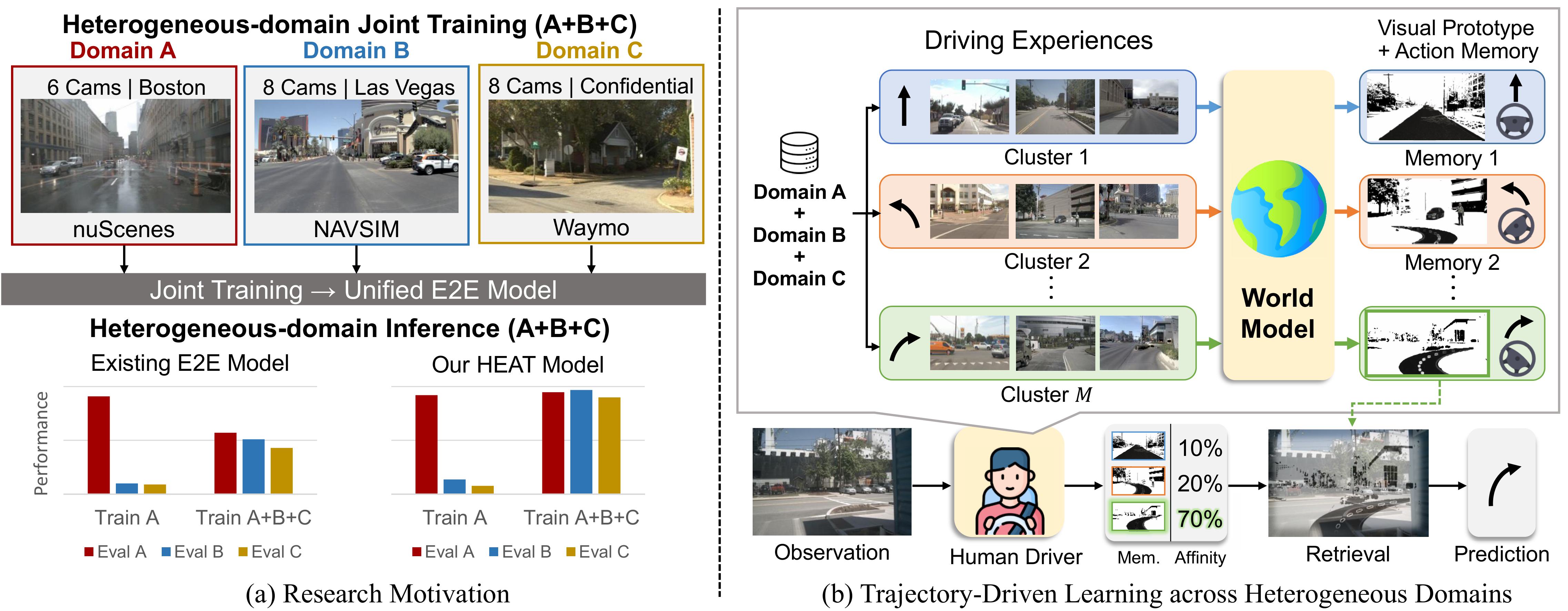 HEAT: Heterogeneous End-to-End Autonomous Driving via Trajectory-Guided World ModelsarXiv preprint arXiv:2605.19631, 2026
HEAT: Heterogeneous End-to-End Autonomous Driving via Trajectory-Guided World ModelsarXiv preprint arXiv:2605.19631, 2026 -
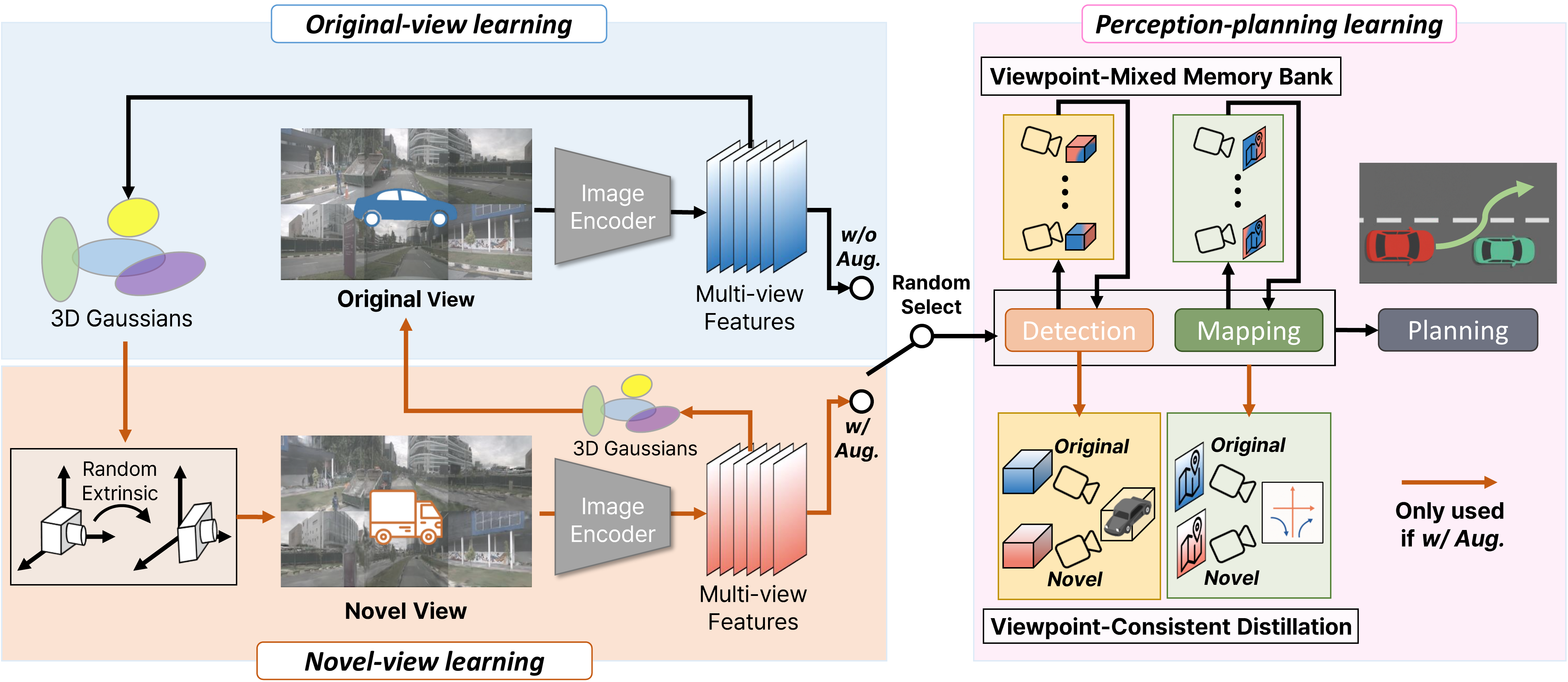 VR-Drive: Viewpoint-Robust End-to-End Driving with Feed-Forward 3D Gaussian SplattingConference on Neural Information Processing Systems (NeurIPS), 2025
VR-Drive: Viewpoint-Robust End-to-End Driving with Feed-Forward 3D Gaussian SplattingConference on Neural Information Processing Systems (NeurIPS), 2025